Dans un logiciel de simulation de piétons, il y a forcément un algorithme qui calcule à tout moment les trajets des occupants, pour qu’ils aillent au plus court, au plus rapide ou selon d’autres contraintes. C’est la planification du cheminement (en anglais « path planning »).
Dans un article que je vous invite à lire (en anglais, publié par FeuerTrutz), Christian Kohler montre l’intérêt de pouvoir connaître et influer sur cet algorithme (entre autres points techniques fort intéressants).
L’algorithme de base considère qu’un occupant connaît toutes les portes de la pièce dans laquelle il se trouve au moment où il faut évacuer le bâtiment, et peut aussi repérer une forte affluence près d’une porte. Il est ainsi libre de choisir une porte et même de changer de porte si une issue lui semble plus rapide.
Mais en général l’usager connaît bien moins la totalité du bâtiment que le logiciel ne connaît la totalité de la géométrie du modèle informatique ! Il sait par où il est entré, et éventuellement quelques autres trajets, mais il est bien rare qu’il connaisse les issues de secours et ce qui se cache derrière ces portes qu’il n’a jamais franchies. Il serait donc faux de considérer que ces issues font partie de ses choix de base au même titre que d’autres portes de la pièce. C’est le phénomène bien connu auquel sont confrontés les responsables de plans d’évacuation : les gens utilisent plus volontiers les trajets habituels et les sorties connues que les issues de secours inexplorées.
On pourrait souhaiter que les logiciels proposent un facteur « connu/inconnu » qui puisse être indiqué pour pondérer les choix d’un occupant par rapport à telles portions de la géométrie.
Kohler teste qu’une pondération équivalente peut être donnée en modifiant un facteur de coût affecté au temps de trajet global entre deux points. Il s’appuie sur le cas d’une salle de spectacle où il place 1000 personnes qui en cas d’évacuation peuvent rejoindre le hall d’entrée en utilisant un corridor en L (en violet sur la figure), ou bien utiliser les issues de secours : deux à l’avant, une à l’arrière de la salle (signalées par un S dans la figure).
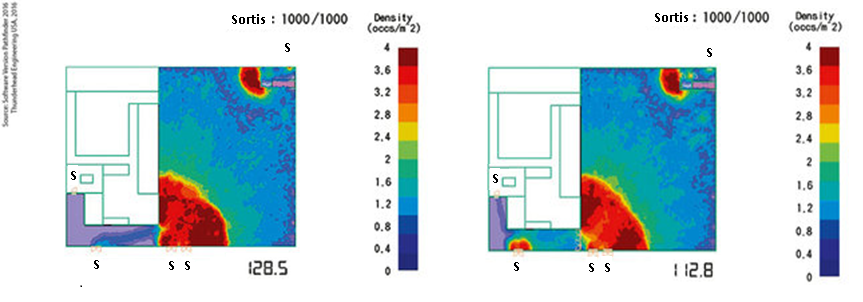 À gauche les courbes de densité avec paramètres par défaut, à droite en modifiant le facteur de coût sur le temps de trajet global.
À gauche les courbes de densité avec paramètres par défaut, à droite en modifiant le facteur de coût sur le temps de trajet global.
Dans une simulation avec les paramètres par défaut, la plupart des occupants utilisent les deux sorties de secours à l’avant de la salle, parce qu’ils « savent » qu’elles donnent dehors : l’algorithme fait comme s’ils disposaient du plan des locaux.
En personnalisant le coût sur le temps de trajet global, les occupants passent moins d’une sortie possible à une autre, utilisent davantage le corridor (ce qui est logique parce qu’ils sont tous entrés par là), et le temps pour faire sortir tout le monde baisse de 15 secondes.